HRI Physio Lib: A software framework to support the integration of physiological adaptation in HRI
Published:
Kothig A., Muñoz J., Mahdi H., Aroyo AM., Dautenhahn K.
Published in International Conference on Social Robotics ‘12. 2020 (ICSR)

Abstract
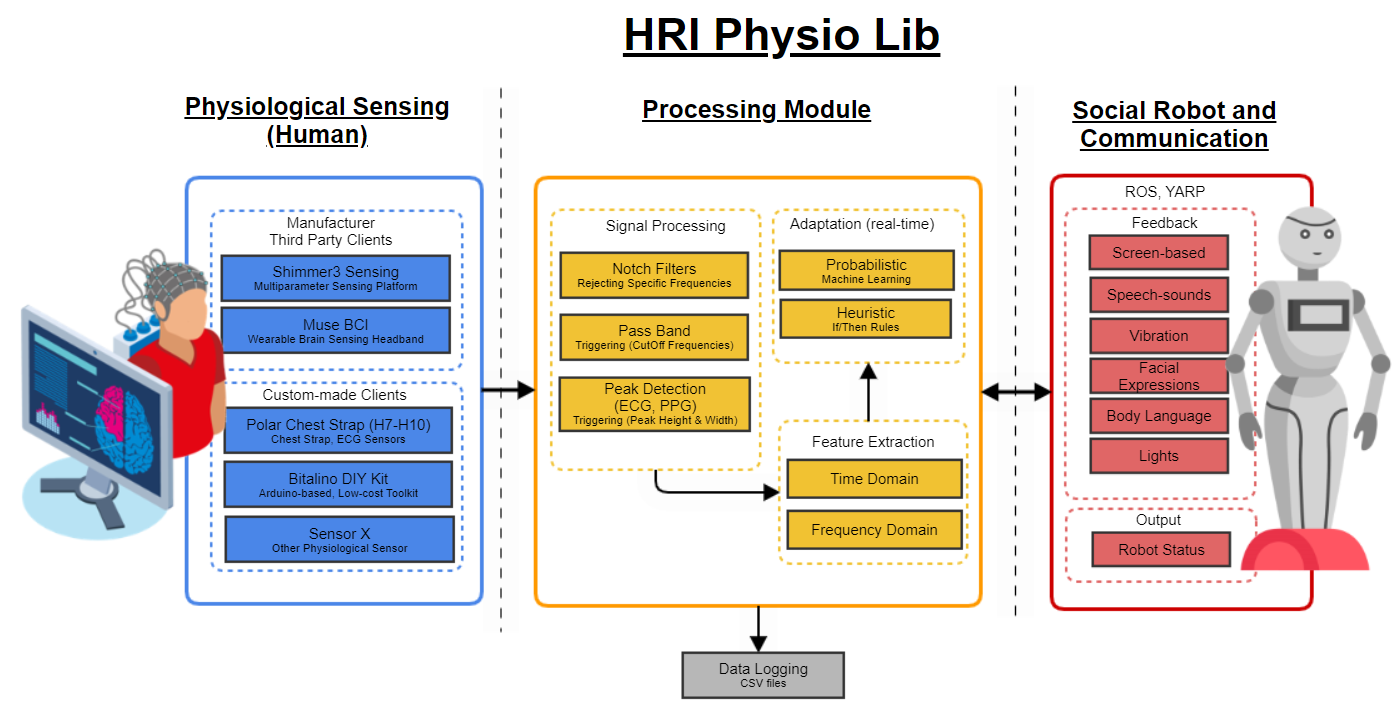
The rise of available physiological sensors in recent years can be attributed to the widespread popularity of commercial sensing technologies equipped with health monitoring technology. To make more engaging human-robot interaction (HRI), social robots should have some ability to infer their social partner's affective state. Measurements of the autonomic nervous system via non-invasive physiological sensors provide a convenient window into a person's affective state, namely their emotions, behavior, stress, and engagement. HRI research has included physiological sensors in-the-loop, however implementations are often specific to studies, and do not lend well for reusability. To address this gap, we propose a modular, flexible and extensible framework designed to work with popular robot platforms. Our framework will be compatible with both lab and consumer grade sensors, and includes essential tools and processing algorithms for affective state estimation geared towards real-time HRI applications.
Images
How to cite?
@inproceedings{kothig2020hri,
title={ {HRI Physio Lib}: A Software Framework to Support the Integration of Physiological Adaptation in {HRI}},
author={Kothig, Austin and Mu{\~n}oz, John and Mahdi, Hamza and Aroyo, Alexander M. and Dautenhahn, Kerstin},
booktitle={International Conference on Social Robotics},
pages={36--47},
month={November},
year={2020},
publisher={Springer International Publishing},
url={http://dx.doi.org/10.1007/978-3-030-62056-1_4},
DOI={10.1007/978-3-030-62056-1_4}
}