An Embodied Approach for Joint Action Collaboration with Humanoid Robots
Published:
Kothig A., Aroyo AM., Dautenhahn K.
In HRI 2022 Workshop on Joint Action, Adaptation, and Entrainment in Human-Robot Interaction (JAAE)

Abstract
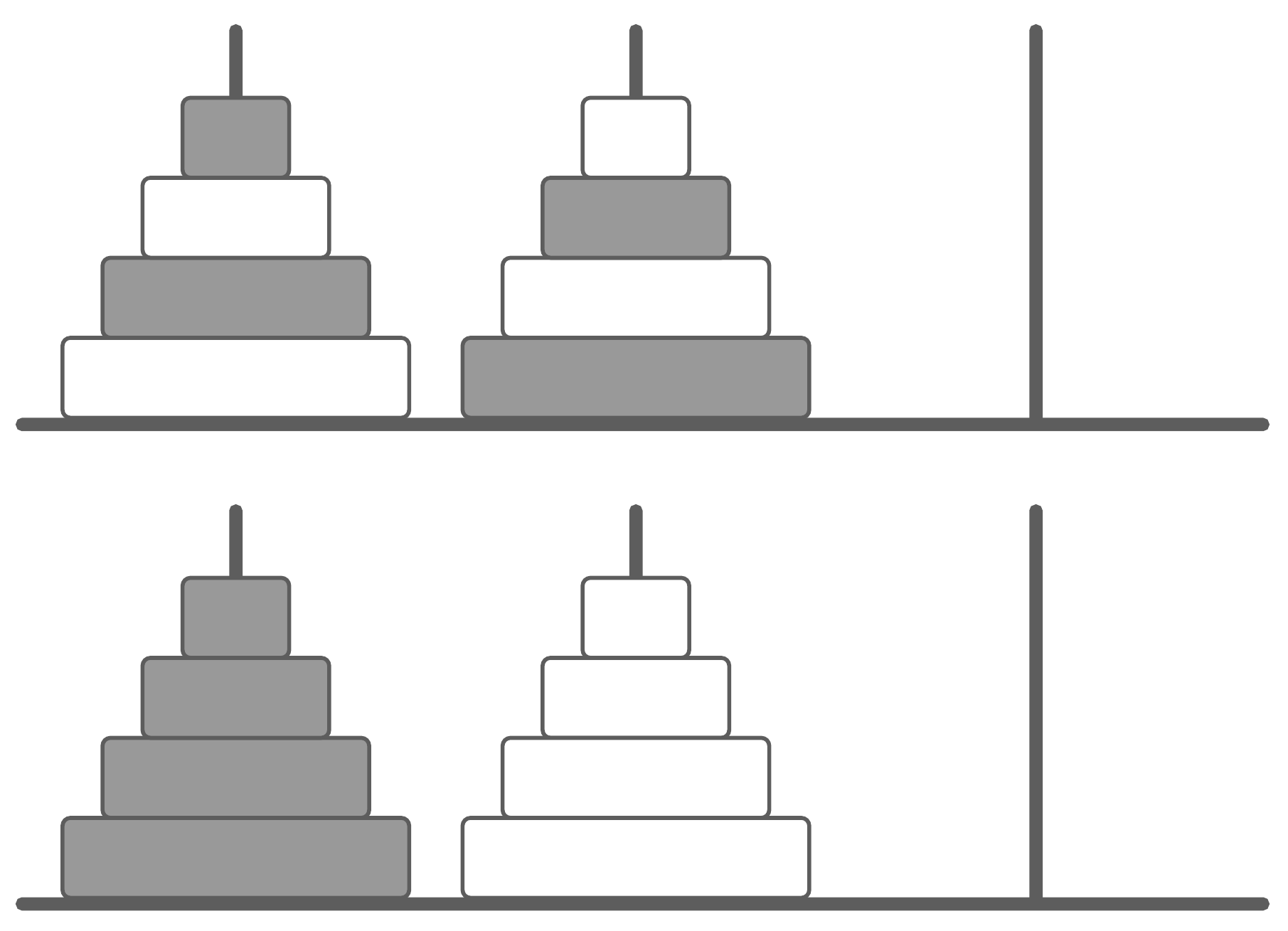
Joint action problems remain a difficult endeavor when social robots are involved. The level of patience that a person has when interacting with a robot has been shown to vary based on their expectations of the robot's capabilities and the difficulty of the task. Social robots, especially humanoid ones, require an additional level of consideration when designing behaviors and interactions to meet such expectations. We aim to explore an approach rooted in the perceived embodiment of a humanoid robot to improve the interaction experience. This manuscript outlines previous work and inspirations for our development thus far. By utilizing a definition of embodiment, we have identified four mutual perturbatory channels that humanoid robots share with people. Through an experimental joint action scenario, we aim to quantify the bandwidth of these perturbatory channels, which we can use to further maximize the embodiment of the robot and improve the user-experience of interaction with the robot.
Images
How to cite?
@inproceedings{kothig2022embodied,
title={An Embodied Approach for Joint Action Collaboration with Humanoid Robots},
author={Kothig, Austin and Aroyo, Alexander M. and Dautenhahn, Kerstin},
booktitle={HRI 2022 Workshop on Joint Action, Adaptation, and Entrainment in Human-Robot Interaction (JAAE)},
publisher={IEEE},
month={March},
year={2022}
}